Research
研究内容
動的システム制御学
- 多様な運動を生み出すしくみ(システム)が生まれるメカニズムについて,ロボティクス及び生物の両面から迫っていくことを目指す
- 機構と制御,アクチュエータとの相互作用を上手く生み出し,環境と上手く適応できるシステムとは?
Bio-inspired robotics と Robotics inspired biology の両輪
- 生物を深く学び活用するロボティクス研究
- ロボティクス技術を活かした生物学研究
研究テーマ
生物の適応的運動発現メカニズムに関する研究
生物のロコモーションメカニズムの解明
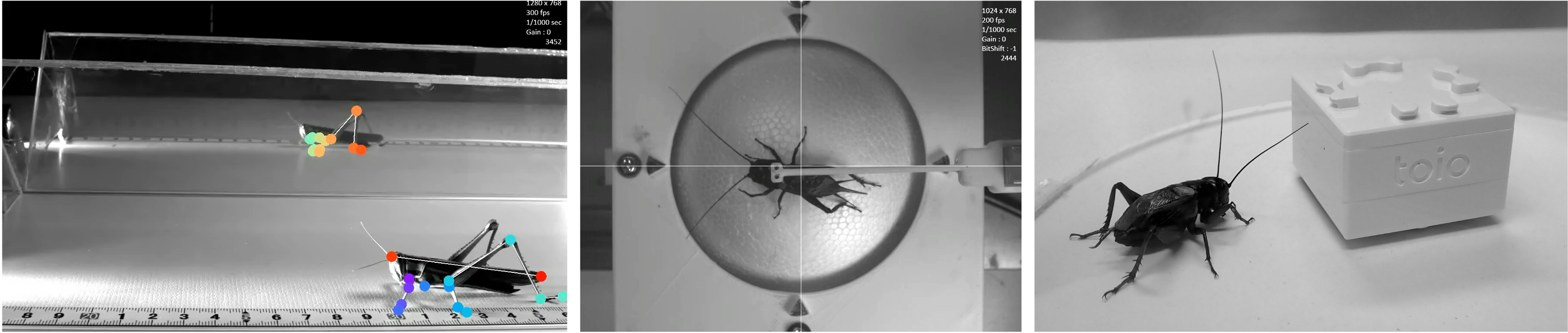
脚を持つ生物は,多様な歩容(歩行パターン) を巧みに遷移させることで,様々な環境に適応しています.そのメカニズムを解明し,生物に比肩する運動性能を持つロボットを実現することは,生物規範型ロボティクスの大きな目標の一つです.そこで,生物のロコモーションメカニズムの解明と,そのメカニズムを活かしたロボットシステムの構築に取り組んでいます.
研究テーマ例として,以下のようなものがあります.
- 昆虫(バッタやコオロギ)の歩容の解析.特にバッタの特異な歩容の解析
- ワニ類の歩行メカニズムの理解と恐竜類の歩行復元
- アギトアリの高速運動メカニズムやカニ型ロボットの開発
関連する主な論文
バッタ・コオロギの歩容解析
- Yasuhiro Sugimoto, Jun Fukui, Keisuke Naniwa, Daisuke Nakanishi, and Koichi Osuka: "Analysis of Body Parameters' Effects on Various Gaits in Locusts", Proc. of the 12th International Symposium on Adaptive Motion of Animals and Mechanics (AMAM 2025), 2025.
- Yasuhiro Sugimoto, Hiromi Togawa, Keisuke Naniwa, Daisuke Nakanishi, and Koichi Osuka: "Analysis of Inter-leg Coordination Mechanisms in Cricket Locomotion: Insights from Thoracic Ganglion Network Transection", Proc. of the 12th International Symposium on Adaptive Motion of Animals and Mechanics (AMAM 2025), 2025.
- Yasuhiro Sugimoto, Shuntaro Sugiyama, Keisuke Naniwa, Koichi Osuka: "Analysis of the unique gait mechanism of locusts focusing on the difference in leg length", Advanced Robotics, Vol.34, No.17, pp.1110-1121, 2020. DOI: 10.1080/01691864.2020.1750481
- Keishuke Naniwa, Yasuhiro Sugimoto, Koichi Osuka and Hitoshi Aonuma: "Defecation initiates walking in the cricket Gryllus bimaculatus", Journal of Insect Physiology, Vol.112, No.3, pp.117-122, 2018. DOI: 10.1016/j.jinsphys.2018.11.004
- Yasuhiro Sugimoto, Keisuke Naniwa, Hitoshi Aonuma, Koichi Osuka: "Microinjection support system for small biological subjects", HardwareX, Vol.7, e00103, 2020. DOI: 10.1016/j.ohx.2020.e00103
ワニ類の歩行・恐竜の復元
- Kaito Kimura, Takahiro Goto, Kazuki Ito, Tetsuya Kinugasa, Kentaro Chiba, Keishuke Naniwa, Daisuke Nakanishi, Koichi Osuka and Yasuhiro Sugimoto: "Modeling musculoskeletal systems with branching structures: a case study with the auxiliary tendon of the caudofemoralis longus muscle in crocodilians", Nonlinear Theory and Its Applications, Vol.E16-N, No.3, 2025. DOI: 10.1587/nolta.16.651
その他の生物(アリ・カニ)
- Hitoshi Aonuma, Keisuke Naniwa, Yasuhiro Sugimoto, Kyohsuke Ohkawara and Katsushi Kagaya: "Embodied latch mechanism of the mandible to power at an ultrahigh speed in the trap-jaw ants Odontomachus kuroiwae", J. Exp. Biol. jeb.245396, 2023. DOI: 10.1242/jeb.245396
- Daisuke Nakanishi, Hiroki Hamaguchi, Yuta Hasegawa, Keisuke Naniwa and Yasuhiro Sugimoto: "Development of Crab-Inspired Robot with Exoskeletal Structure and Embedded Pneumatic Artificial Pennate Muscles", J. Robot. Mechatron., Vol.37, No.6, pp.1581-1592, 2025. DOI: 10.20965/jrm.2025.p1581
コオロギの闘争行動メカニズム
雄コオロギは他雄個体と遭遇すると闘争行動を行い,勝ち負けがつきます.勝った個体は攻撃性を維持し,負けた個体は攻撃性が急激に減少する振る舞いを見せます.
これらの行動の背景には,攻撃性を司る内部状態が存在すると考えられています.その時々の内部状態に基づいて闘争行動のフェーズ切り替えや行動選択が決定されることが示唆されています.しかし,これらの内部状態が外部刺激によってどのように変容するのかは未解明です.
そこで,小型移動ロボットを用いて闘争行動に介入することで,外部刺激と内部状態変容の因果関係を明らかにすることを目指しています.
- コオロギの闘争行動を誘引可能な小型移動ロボット
- 闘争行動を引き起こすアンテナフェンシングの構成論的理解
関連する主な論文
- 杉本靖博:「運動への介入から解き明かす闘争行動を引き起こすコオロギのアンテナフェンシング」,昆虫と自然,Vol.54, No.6, pp.33-36, 2019.
- 杉本靖博, 青沼仁志: “小型移動ロボットToio を用いたクロコオロギの闘争行動に介入可能なシステム開発”, 第68 回システム制御情報学会研究発表講演会(SCI’24), 33I-3, 2024.
Mckibben型空気圧アクチュエータ(Mckibben Pneumatic Actuator:MPA)に関する研究
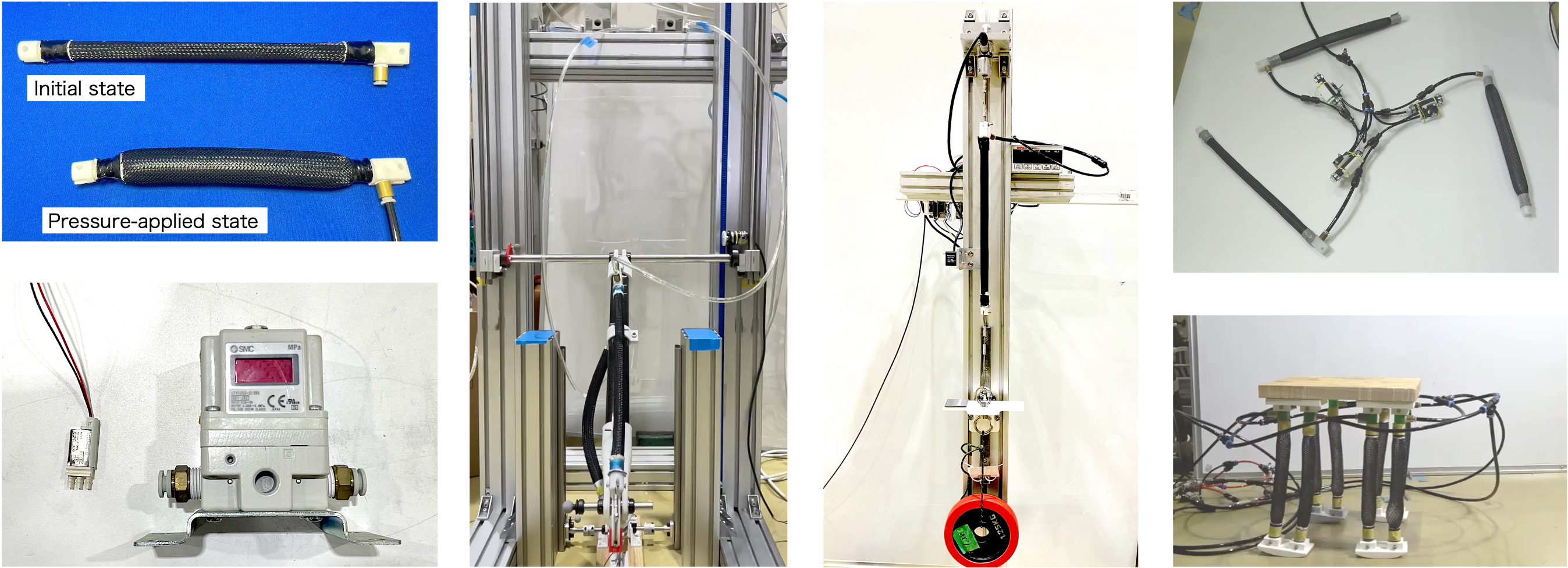
McKibben Pneumatic Actuator(MPA) は,空気圧アクチュエータの一種で,圧縮空気によって骨格筋のように収縮して力を発揮するアクチュエータです.軽量で高出力,可変剛性,受動的特性を持ち,各種ロボットや,アシストスーツ,リハビリ機器などのアクチュエータとして用いられています.そこで,MPAの特性を活かしたロボットシステムの構築や,MPAの制御手法の開発に取り組んでいます.
研究テーマ例として,以下のようなものがあります.
- MPAのモデリング
- MPA駆動ロボットにおける自律的協調運動生成
- 機構とMPAの相互作用を利用し,よりダイナミックな運動の実現
- 動的量子化器を用いたMPAの制御
関連する主な論文
MPAのモデリング・特性解析
- Takahiro Goto, Keisuke Naniwa, Daisuke Nakanishi, Yasuhiro Sugimoto, Yasushi Yagi, Yasushi Makihara, Tomoya Nakamura and Koichi Osuka: "Characteristics verification of pneumatic artificial muscles for compressive loading", Advanced Robotics, Vol.37, No.14, pp.887-899, 2023. DOI: 10.1080/01691864.2023.2226200
- Daisuke Nakanishi, Yasuhiro Sugimoto, Hiroaki Honda, Koichi Osuka: "Measurement experiments and analysis for modeling of McKibben Pneumatic Actuator", Journal of Robotics and Mechatronics, Vol. 28, No. 6, pp. 830-836, 2016. DOI: 10.20965/jrm.2016.p0830
- 吉田 匠吾, 中西 大輔, 浪花 啓右, 杉本 靖博, 大須賀 公一: 「McKibben 型空気圧アクチュエータの線形近似された張力モデルの実機検証」, 日本機械学会論文集, Vol.85, No.878, p. 18-00498, 2019. DOI: 10.1299/transjsme.18-00498
- Yasuhiro Sugimoto, Keisuke Naniwa, Koichi Osuka, Yoshiyuki Sankai: "Static and Dynamic Properties of McKibben Pneumatic Actuator for Self-stability of Legged-Robot Motion", Advanced Robotics, Vol.27, No.5, 2013. DOI: 10.1080/01691864.2013.763007
制御手法(小型弁・量子化器)
- Yasuhiro Sugimoto, Keisuke Naniwa, Daisuke Nakanishi, Koichi Osuka: "Control of Multiple McKibben Pneumatic Actuators Using Small Solenoid Valves and Dynamic Quantizer", J. Robot. Mechatron., Vol.37, No.1, pp.123-134, 2025. DOI: 10.20965/jrm.2025.p0123
- Yasuhiro Sugimoto, Keisuke Naniwa, Daisuke Nakanishi and Koichi Osuka: "Length control of a McKibben pneumatic actuator using a dynamic quantizer", Robomech Journal, Vol.11, No.8, 2024. DOI: 10.1186/s40648-024-00276-0
- Yasuhiro Sugimoto, Keisuke Naniwa, Daisuke Nakanishi, Koichi Osuka: "Tension Control of a McKibben Pneumatic Actuator Using a Dynamic Quantizer", Journal of Robotics and Mechatronics, Vol.35, No.4, pp.1038-1046, 2023. DOI: 10.20965/jrm.2023.p1038
跳躍運動・運動生成
- Taichi Okumura, Daisuke Nakanishi, Keisuke Naniwa, Yasuhiro Sugimoto and Koichi Osuka: "Relationship between the shape of the elliptical knee joint and jumping height in a leg-type robot driven by pneumatic artificial muscle", Robomech Journal, Vol.10, No.10, 2023. DOI: 10.1186/s40648-023-00250-2
自律的協調制御(拮抗駆動)
- 中西 大輔,門𦚰 唯菜,重松 大樹,浪花 啓右,杉本 靖博: 「張力フィードバックによる拮抗二関節筋の自律的協調制御」, 計測自動制御学会論文集, Vol.60, No.1, pp.47-57, 2024. DOI: 10.9746/sicetr.60.47
- Takahiro Goto, Yasuhiro Sugimoto, Daisuke Nakanishi, Keisuke Naniwa, Koichi Osuka: "Analysis of mode bifurcation between McKibben pneumatic actuators in the Antagonist Musculoskeletal Model", Nonlinear Theory and Its Applications, Vol.E13-N, No.4, 2022. DOI: 10.1587/nolta.13.598
- Takahiro Goto, Yasuhiro Sugimoto, Daisuke Nakanishi, Keisuke Naniwa, Koichi Osuka: "Analysis of autonomous coordination between McKibben pneumatic actuators in the antagonist musculoskeletal model", Nonlinear Theory and Its Applications, Vol.12, No.3, pp.424-441, 2021. DOI: 10.1587/nolta.12.424
- Takahiro Goto, Yasuhiro Sugimoto, Daisuke Nakanishi, Keisuke Naniwa, and Koichi Osuka: "Analysis of Autonomous Coordination Between Actuators in the Antagonist Musculoskeletal Model", Journal of Robotics and Mechatronics, Vol.33, No.2, pp.410-420, 2021. DOI: 10.20965/jrm.2021.p0410
歩行ロボット,特に受動的動歩行(Passive Dynamic Walking:PDW)について
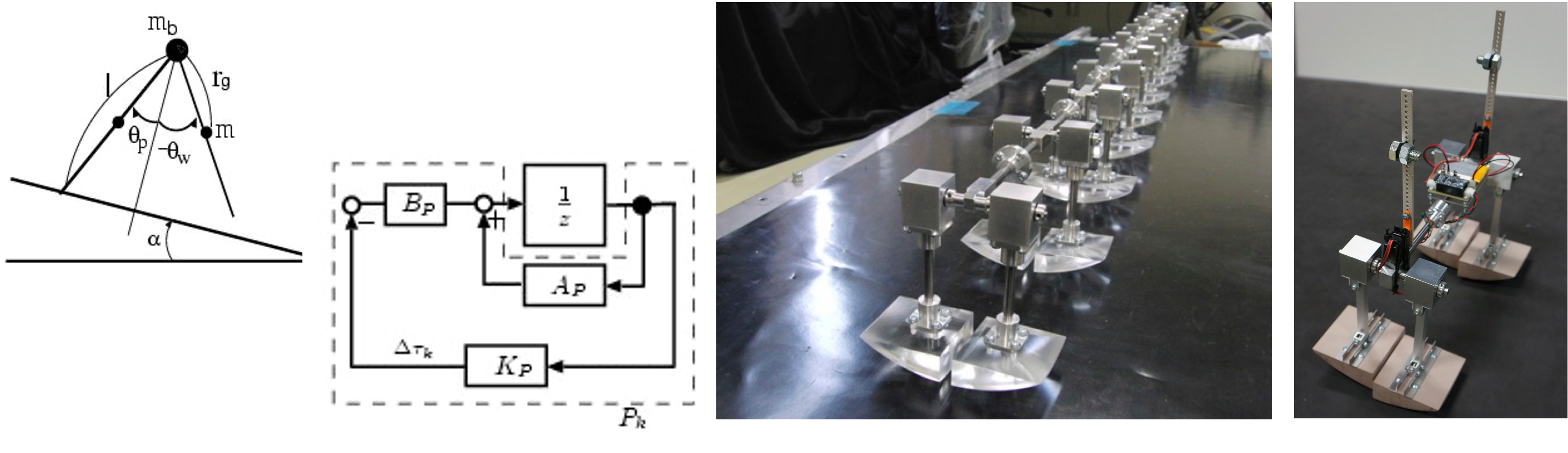
受動的動歩行とは,アクチュエータを持たないロボットが,適切な初期値から運動を始めると重力場をうまく利用しながら,下り坂を歩き続ける運動のことをいいます (T. McGeer 1990).制御をいれることなく機構のみで実現され,滑らかでヒトの歩行に類似しています.さらに,非線形力学系としても興味深い現象(引き込み現象,分岐現象)を示すことが知られています.そこで,受動的動歩行のメカニズムの解明や,受動的動歩行の特性を活かした歩行ロボットの開発に取り組んでいます.
研究テーマ例として,以下のようなものがあります.
- 受動的動歩行に内在する安定化メカニズムの解析
- 準受動的動歩行の実現
- 超多脚型受動的動歩行ロボット
- 非線形制御と受動的動歩行
関連する主な論文
受動的動歩行の解析と応用
- 杉本靖博,吉岡秀隆,大須賀公一:「超多脚型受動的動歩行の実現」,日本ロボット学会誌,Vol.28, No.8, pp.961-969, 2010. DOI: 10.7210/jrsj.28.961
- Tetsuya Kinugasa and Yasuhiro Sugimoto: "Dynamically and Biologically Inspired Legged Locomotion: A Review", Journal of Robotics and Mechatronics, Vol.29, No.3, pp.450-470, 2017. DOI: 10.20965/jrm.2017.p0450
- Kazuhiko Nakatani, Yasuhiro Sugimoto, Koichi Osuka: "Demonstration and Analysis of Quadrupedal Passive Dynamic Walking", Advanced Robotics, Vol.23, No.5, pp.483-501, 2009. DOI: 10.1163/156855309X420039
- 杉本靖博,大須賀公一: 「連続型遅延フィードバック制御に基づく脚ロボットの準受動的歩行安定化制御」, 日本ロボット学会誌, Vol.23, No.4, pp.435-442, 2005. DOI: 10.7210/jrsj.23.435
- 大須賀公一, 杉本靖博,杉江俊治: 「遅延フィードバック制御に基づく準受動的歩行の安定化制御」, 日本ロボット学会誌, Vol.22, No.2, pp.193-200, 2004. DOI: 10.7210/jrsj.22.193
- 杉本靖博, 大須賀公一: 「受動的動歩行の安定性に関する一考察 --ポアンカレマップの構造解釈からのアプローチ」, システム制御情報学会論文誌, Vol.18, No.7, pp.255-260, 2005. DOI: 10.5687/iscie.18.255
非線形制御との連携・蔵本モデル
- Yasuhiro Sugimoto, Takeshi Kibayashi, Masato Ishikawa and Koichi Osuka: "Nonlinear Control by Coupled Oscillator: from Nonholonomic Systems to Quasi-Passive Dynamic Walker", Nonlinear Theory and Its Applications, Vol.E6-N, No.4, pp.475-487, 2015. DOI: 10.1587/nolta.6.475
- 木林 傑, 杉本 靖博, 石川 将人, 大須賀 公一, 山海 嘉之: 「揺動による四脚準受動的動歩行の実現と非ホロノミックモデルに基づく運動解析」, 日本ロボット学会誌, Vol.8, No.31, pp.10-18, 2013. DOI: 10.7210/jrsj.31.730
システムバイオメカニクス,特に運動の安定性について
- 筋骨格系が持つ特性が運動の安定性にどう寄与するか
関連する主な論文
筋骨格系の自己安定性
- Yasuhiro Sugimoto, Shinya Aoi, Naomichi Ogihara, Kazuo Tsuchiya: "The Stabilizing function of musculoskeletal system for periodic motion", Advanced Robotics, Vol.23, No.5, pp.521-534, 2009. DOI: 10.1163/156855309X420075
- Handdeut Chang, Yasuhiro Sugimoto, Koich Osuka and Yoshiyuki Sankai: "Self-Stabilizing Function of Two Dimensional human Lower Limb Musculoskeletal System", 2012 IEEE Int'l. Conf. on Robotics and Biomimetics (ROBIO2012), pp.390-395, 2012. DOI: 10.1109/ROBIO.2012.6491038
無線通信を利用した移動ロボットに関する研究
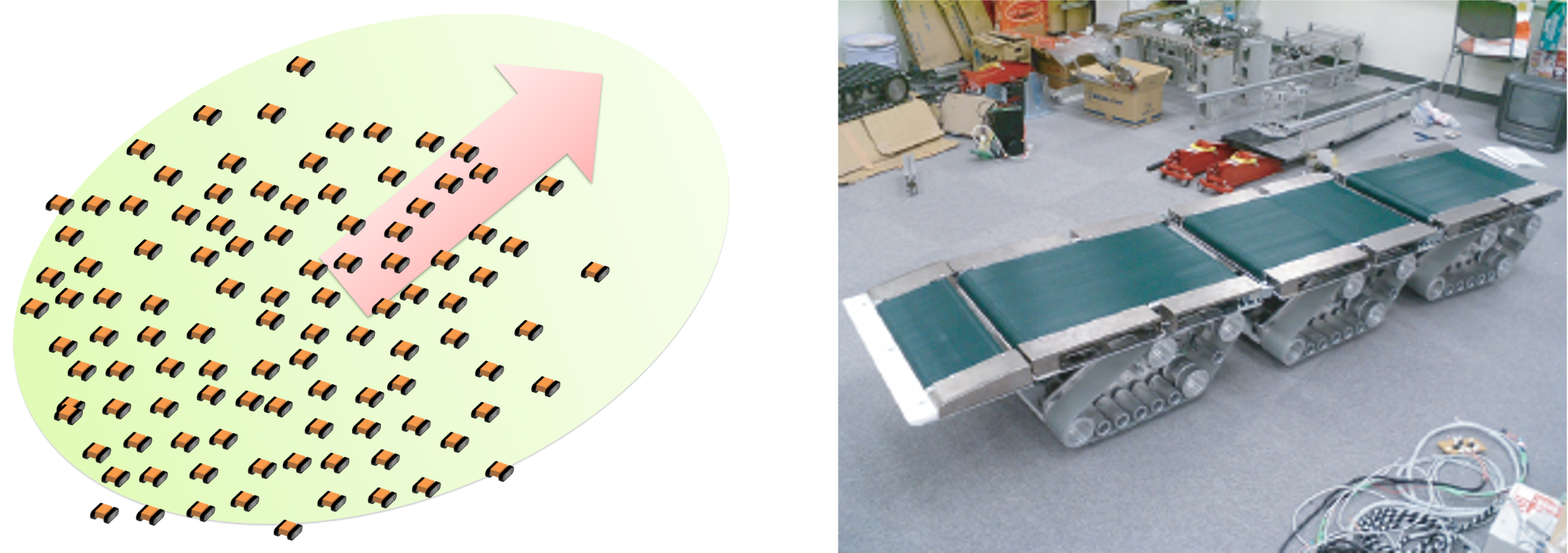
- 超群ロボットの実現
- DUCKSの自動整列に関する研究
関連する主な論文
群れ行動・分散制御
- Yasuhiro Sugimoto, Shinichi Uchida, Yuichiro Sueoka and Koichi Osuka: "Localization and Flocking Behavior Realization of Multi-Robot System based only on Ad-hock Network", SWARM 2015, pp. 283-284, 2015.
自動連結・ナビゲーション
- 杉本 靖博, 新宮 嵩規, 清水 克哉, 大須賀 公一: 「たすきがけ偏差に基づく移動車両群の自動連結のための単純接近アルゴリズム」, 日本ロボット学会誌, Vol.32, No.3, pp.275-285, 2014. DOI: 10.7210/jrsj.32.275